Q-Learning Example: A Practical Guide to Reinforcement Learning
Reinforcement learning, a subset of machine learning, empowers agents to learn optimal behaviors through trial and error. Among various reinforcement learning algorithms, Q-learning stands out for its simplicity and effectiveness. This article delves into a comprehensive Q-learning example, providing a practical understanding of its implementation and application. We’ll explore the core concepts, walk through a step-by-step implementation, and discuss real-world scenarios where Q-learning shines. This exploration aims to demystify Q-learning, making it accessible to both beginners and experienced practitioners.
Understanding the Fundamentals of Q-Learning
At its heart, Q-learning is an off-policy, temporal difference learning algorithm. Let’s break down this jargon:
- Off-policy: The algorithm learns the optimal policy independent of the agent’s actions. This means it can learn from experiences generated by a different policy or even random exploration.
- Temporal Difference (TD) Learning: TD learning updates estimates based on other estimates. In Q-learning, the algorithm updates the Q-value of a state-action pair based on the immediate reward and the estimated optimal future reward.
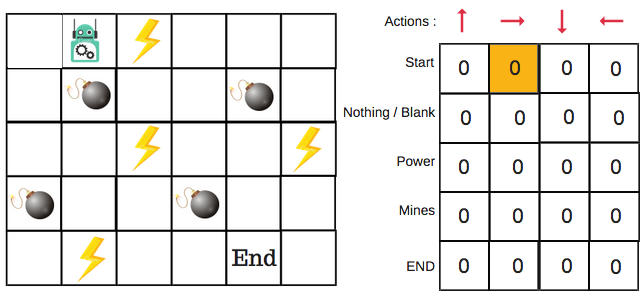
The core of Q-learning revolves around the Q-table (or Q-function). The Q-table is a matrix where rows represent states, columns represent actions, and each cell (Q-value) represents the expected cumulative reward for taking a specific action in a specific state. The goal of Q-learning is to learn the optimal Q-values, which represent the best possible action to take in each state.
The Q-Learning Equation
The Q-learning update rule is defined by the following equation:
Q(s, a) = Q(s, a) + α [R(s, a) + γ * maxₐ’ Q(s’, a’) – Q(s, a)]
Where:
- Q(s, a) is the Q-value for state ‘s’ and action ‘a’.
- α (alpha) is the learning rate (0 < α ≤ 1). It determines how much of the new information overrides the old information. A value of 0 means the agent learns nothing, while a value of 1 means the agent completely replaces the old value with the new one.
- R(s, a) is the reward received after taking action ‘a’ in state ‘s’.
- γ (gamma) is the discount factor (0 ≤ γ ≤ 1). It determines the importance of future rewards. A value of 0 means the agent only considers immediate rewards, while a value of 1 means the agent considers all future rewards equally.
- s’ is the next state after taking action ‘a’ in state ‘s’.
- a’ is the action that maximizes the Q-value in the next state s’.
- maxₐ’ Q(s’, a’) is the maximum Q-value achievable from the next state s’.
A Step-by-Step Q-Learning Example: The FrozenLake Environment
To illustrate Q-learning in action, we’ll use the FrozenLake environment from OpenAI Gym. This environment represents a frozen lake where the agent’s goal is to navigate from the starting point (S) to the goal (G) without falling into any holes (H). The lake is represented as a grid of states.
Environment Setup
First, let’s install the necessary libraries:
pip install gym numpyThen, import the libraries and create the FrozenLake environment:
import gym
import numpy as np
env = gym.make('FrozenLake-v1', is_slippery=False) # Setting is_slippery to False for deterministic behavior
state_space = env.observation_space.n
action_space = env.action_space.n
Here, `is_slippery=False` makes the environment deterministic, meaning the agent always moves in the intended direction. This simplifies the Q-learning example for demonstration purposes. If you want to make the environment harder, set it to `True`.
Initializing the Q-Table
Next, we initialize the Q-table with zeros:
q_table = np.zeros((state_space, action_space))
This creates a Q-table with `state_space` rows and `action_space` columns, all initialized to zero.
Q-Learning Algorithm Implementation
Now, let’s implement the Q-learning algorithm:
num_episodes = 1000
learning_rate = 0.9
discount_factor = 0.9
for episode in range(num_episodes):
state = env.reset()
done = False
while not done:
# Choose an action (Exploitation)
action = np.argmax(q_table[state, :])
# Take the action and observe the next state and reward
new_state, reward, done, info = env.step(action)
# Update the Q-table
q_table[state, action] = q_table[state, action] + learning_rate * (reward + discount_factor * np.max(q_table[new_state, :]) - q_table[state, action])
# Update the state
state = new_state
print("Q-table:")
print(q_table)
In this code:
- `num_episodes` determines the number of episodes the agent will learn from.
- `learning_rate` and `discount_factor` are the parameters discussed earlier.
- Inside the loop, the agent chooses an action based on the current Q-table (exploitation). In a real-world scenario, you would typically add an exploration component (e.g., epsilon-greedy) to balance exploration and exploitation.
- The agent takes the chosen action and observes the next state and reward.
- The Q-table is updated using the Q-learning equation.
Evaluating the Learned Policy
After training, we can evaluate the learned policy:
total_reward = 0
num_eval_episodes = 100
for episode in range(num_eval_episodes):
state = env.reset()
done = False
episode_reward = 0
while not done:
action = np.argmax(q_table[state, :])
new_state, reward, done, info = env.step(action)
episode_reward += reward
state = new_state
total_reward += episode_reward
average_reward = total_reward / num_eval_episodes
print(f"Average reward over {num_eval_episodes} episodes: {average_reward}")
This code evaluates the agent’s performance over `num_eval_episodes` episodes and calculates the average reward. A higher average reward indicates a better-learned policy.
Addressing Exploration vs. Exploitation
The provided Q-learning example uses a purely exploitative approach after each episode. In practice, balancing exploration and exploitation is crucial for effective learning. A common technique is the epsilon-greedy strategy, where the agent chooses a random action with probability epsilon (exploration) and the best-known action with probability 1-epsilon (exploitation). Epsilon is often decreased over time to encourage more exploitation as the agent learns.
Real-World Applications of Q-Learning
Q-learning has found applications in various domains, including:
- Robotics: Training robots to perform tasks such as navigation, object manipulation, and assembly.
- Game Playing: Developing AI agents for games like chess, Go, and video games.
- Resource Management: Optimizing resource allocation in areas like traffic control, energy management, and supply chain management.
- Finance: Developing trading strategies and risk management systems.
Advantages and Disadvantages of Q-Learning
Advantages:
- Simplicity: Q-learning is relatively easy to understand and implement.
- Model-Free: It doesn’t require a model of the environment.
- Off-Policy: It can learn from experiences generated by any policy.
Disadvantages:
- Curse of Dimensionality: The Q-table can become very large for environments with a large state or action space.
- Slow Convergence: Q-learning can be slow to converge, especially in complex environments.
- Discrete Action Space: It’s typically used with discrete action spaces.
Conclusion
This Q-learning example provides a practical introduction to reinforcement learning. By understanding the fundamentals, implementing the algorithm, and exploring real-world applications, you can leverage Q-learning to solve complex problems in various domains. While Q-learning has its limitations, its simplicity and effectiveness make it a valuable tool in the arsenal of any machine learning practitioner. Remember to explore techniques like epsilon-greedy for balancing exploration and exploitation, and consider alternative reinforcement learning algorithms for environments with continuous action spaces or very large state spaces. [See also: Deep Reinforcement Learning Explained] As you delve deeper into the world of reinforcement learning, you’ll discover the power of algorithms like Q-learning in enabling agents to learn and adapt to complex environments. The journey of mastering Q-learning begins with understanding its core mechanics and experimenting with diverse applications. Continued practice and exploration will solidify your understanding and unlock the full potential of this powerful algorithm.
